The title of my senior design project was Robot Soccer Controlled and Broadcast to Twitch. It was pretty much the coolest project ever.
At Purdue, senior design projects are submitted in the spring the year prior. Senior design in ECE requires a few things:
- Use of a microcontroller
- A non-trivial set of integration with other chips
- A PCB to connect the various components
Around the time I was writing the proposal, Twitch Plays Pokemon had just happened for the first time and we wanted to create something like that. The basic idea was that we would design a set of robots that could be controlled through twitch. Viewers would enter commands in the chat interface. These commands would be received, queued, and eventually sent to the robots. The viewers would have live feeds from webcams on the field as well as a video stream from the perspective of each robot.
To make this all work, we had a server running on a raspberry pi that would act as a host for the two robots. Originally the pi was also tasked with receiving video feeds from each robot and an on-field webcam, but that ended up being too much data. The on-robot cameras were cut and video ended up being managed by a laptop.
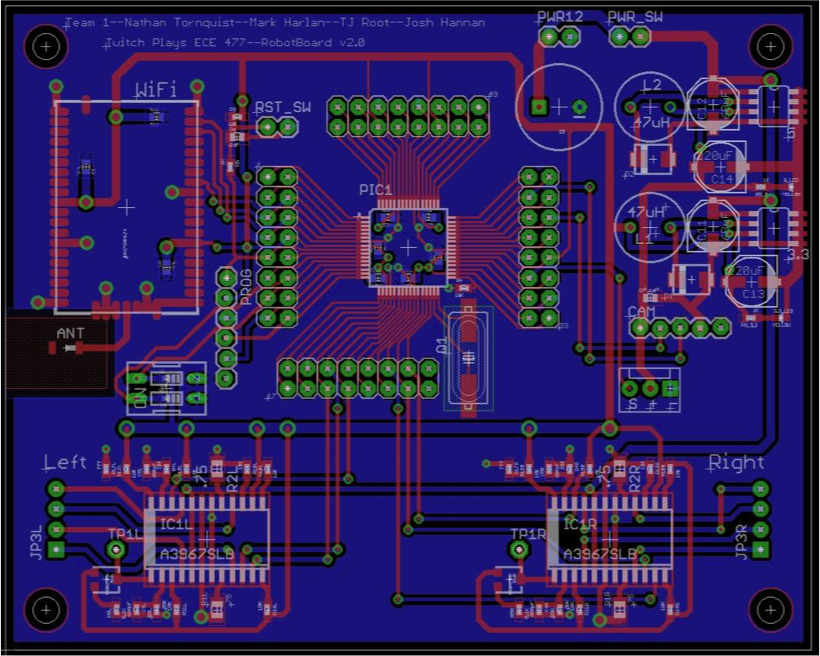
The robots needed to be able to make network requests to the server and control the motor drivers that directed the wheels and front paddle (for kicking). This could have all been accomplished with a raspberry pi on each robot, but to meet the requirements for the project, we used a PIC32 microcontroller that communicated with a RN171 WiFi module and the motor controllers. The board photos below show how all of the components were connected. The PIC32 was at the center, with WiFi in the top left, power in the top right, and a motor controller in each of the two bottom corners.

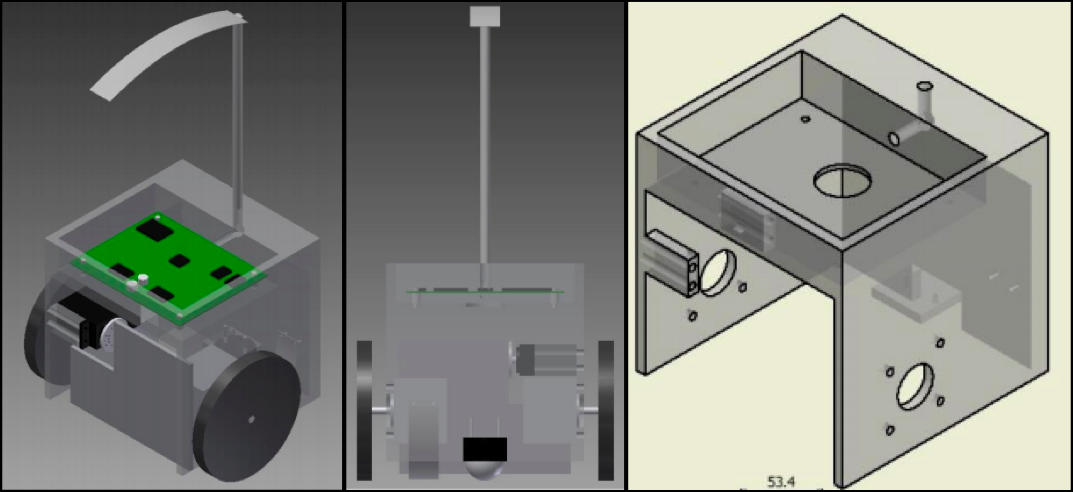
One of the most interesting aspects of the project was how to power the robots. If we wanted the robots to be fully user controllable, we needed to make sure that users could not just make each robot go in circles and tangle everything up. To accomplish this, we decided to copy bumper cars and ground the soccer field and have a charged grid on the top for the robots to connect to. Below are renderings of the early designs illustrating this concept.
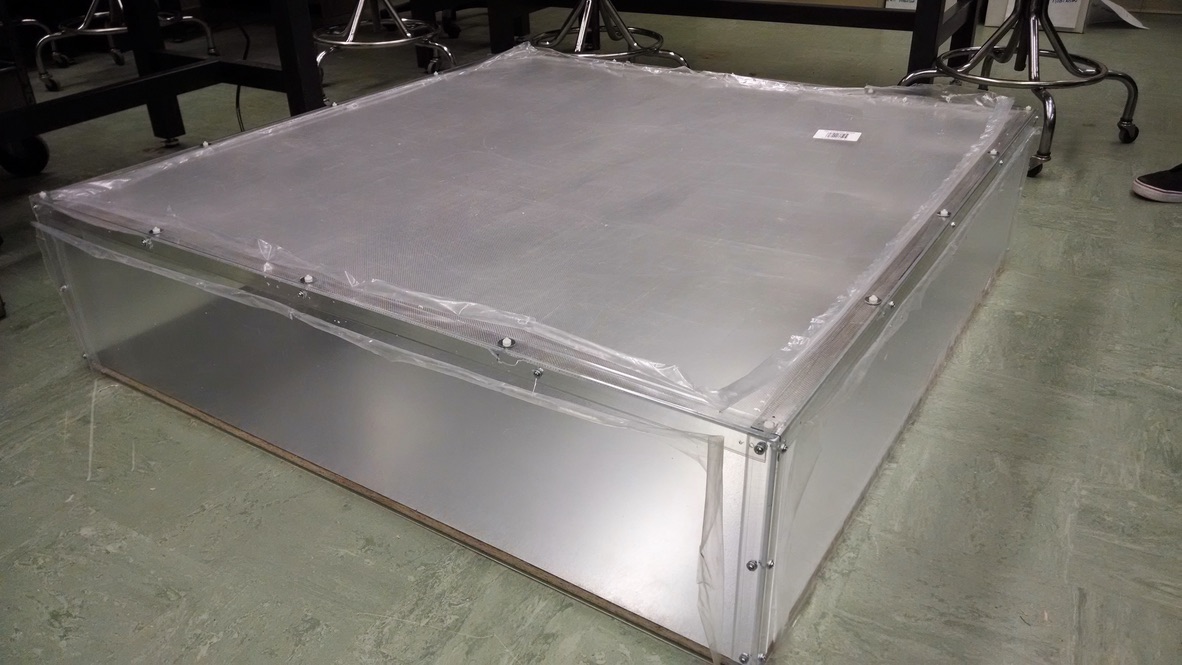
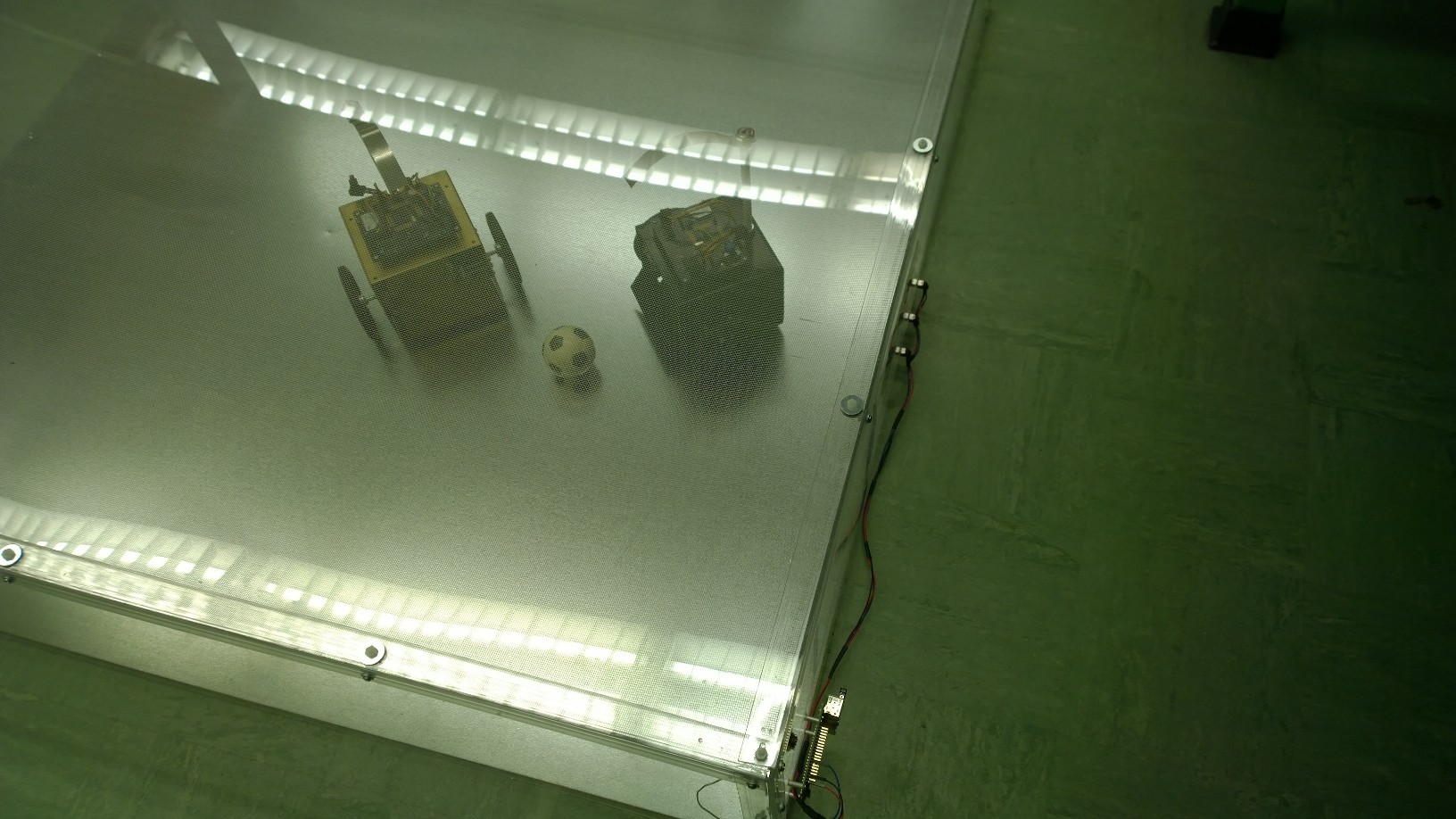
The arena was built out of plexiglass with a stainless steel bottom and screen door material for the powered grid on the top.
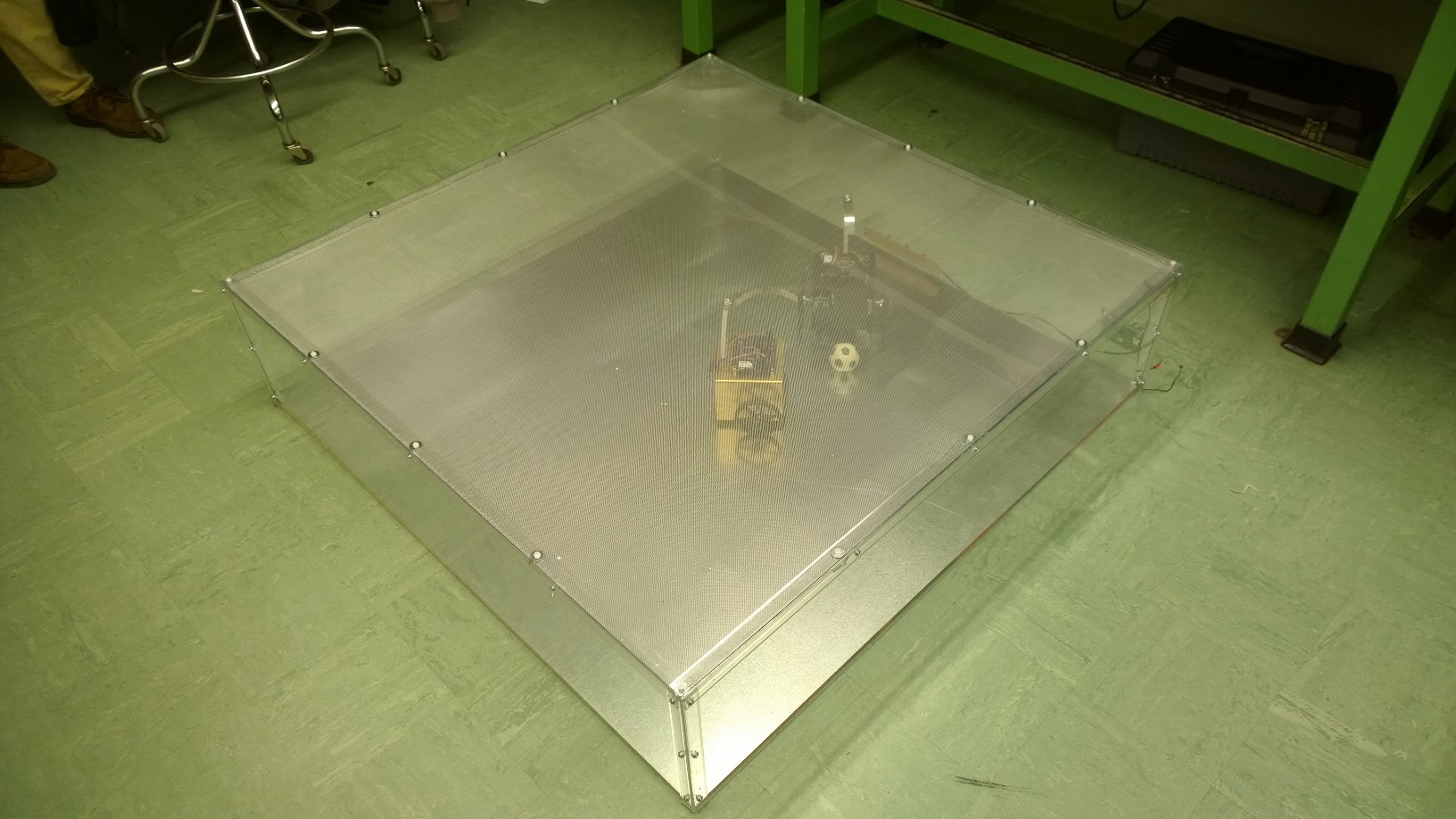
With everything put together, this is what the robots look like inside the arena.
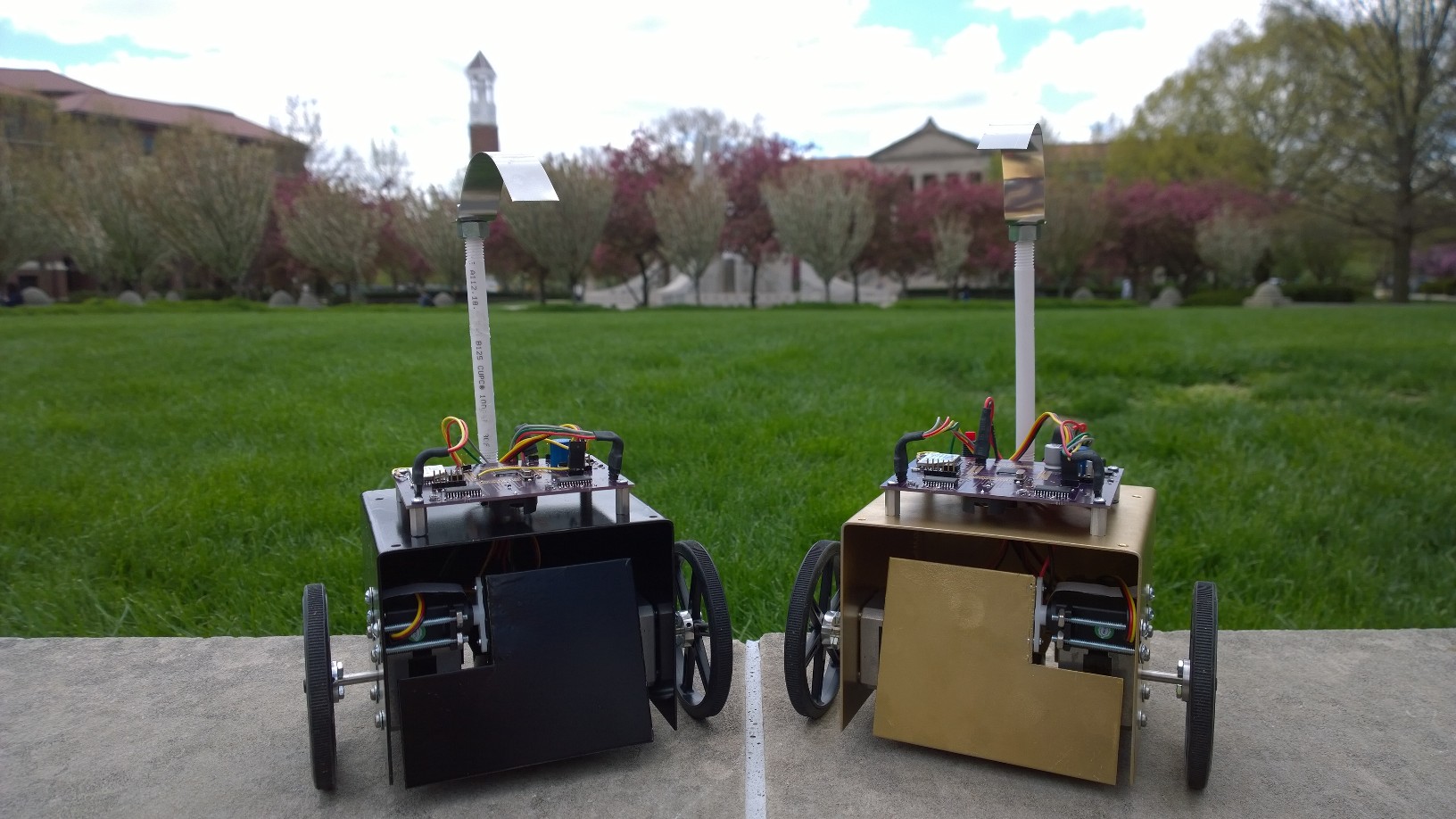
Some better photos of the robots:

This is our (extremely gaudy) promo/demo video:
All in, this project worked surprisingly well. The biggest issue we had was caused by the flex in the plexiglass. We should have built a more stable frame on the outside to keep it from sagging. We used spring steel to connect to the powered grid, and it ended up needing more force for a solid connection than we had anticipated. This meant that the robots either moved really well on the outside of the arena, or really well on the inside.
Despite the difficulties, users were able to connect to the twitch feed and remotely control our robots. Thanks to Mark Harlan, TJ Root, and Josh Hannan for working alongside me on this project.